德国大众汽车公司从1995年起,开始对CAN的研究和开发。并且在一开始,就要求集团下属的所有子公司均要采用统一一致的技术标准和数据定义。在大众汽车公司的研究开发部门中,有一个预开发部门,其职责之一是为各有关专业部门的开发制定应用层上的大众标准、网络框架和数据定义。
按网络的连接对象划分,在大众汽车公司生产的汽车中,大部分采用两组双绞线的CAN网络,它们是:
1 用于驱动系统的高速CAN,其通信速率为500kb/s;
2 用于车身(舒适)系统的低速CAN,其通信速率为100kb/s。
但对于奥迪A6 V6和帕萨特B5 V6车型,则在上述两组CAN网络的基础上,又增加一组CAN网络,即:
3 用于信息/娱乐系统的低速CAN,其通信速率为100kb/s。
对于2004年8月新下线的Touran(途安)商务车,则在上述三组CAN网络的基础上,又增加了两组CAN网络,成为在国内生产大众车系的产品中,安装CAN网络系统最多的车型,即:
4 用于电子组合仪表的CAN;
5 用于自诊断的CAN。
以上所安装的各组总线,完全能够满足ISO的定义。在这里需要强调的是,用于车身(舒适)系统的低速CAN,已经从2000年开始,将其通信率由62.6kb/s提高到100/kb/s。
此外,还有一个重要的特征,便是在车身(舒适)系统的CAN中,引入了网络管理的概念。这对于事件触发性质的数据通信来说,是非常合适的。用于驱动系统的高速CAN和用于车身(舒适)系统的低速CAN是两个相互独立的总线。但从资源共享的角度来看,它们之间最好有座桥梁,以便使车身(舒适)系统也能获得驱动系统的信息。当然,从传统思路上来考虑,只要增加几根导线似乎就能解决问题,但从实际开发的角度,在现有的控制器硬件上,要增加哪怕一个信号引出脚,均将会导致硬件的重新设计,往往成本和进度都不允许这么做。如果在系统中设立一个网关的话,则随时都可以获得对方的信息,且根本不涉及到在硬件上的任何改动。对于网关来说,它可以是一个单独的硬件控制器,也可以“寄生”在某个控制器(如组合仪表)内。网关已经于2000年被应用在德国大众汽车公司的新车型和改型车上。例如:上海大众生产的POLO 1.4L和1.6L轿车就装用了网关系统(其地址码为—09)。
除上述2组CAN总线外,在装备了GPS(卫星导航系统)和智能通信系统的车辆上,还装有第3组CAN总线,即通信系统CAN。
1 驱动系统CAN
驱动系统CAN的主要连接对象如下:
1 发动机控制单元(ECU);
2 防抱死制动系统(ABS)/自动防侧滑控制(ASR)/电子稳定程序(ESP)的ECU;
3 安全气囊(SRS)的ECU;
4 自动变速器的ECU;
5 电子组合仪表的ECU等。
显然,将以上控制单元归并到一组数据总线上时非常合理的。因为它们所具备的基本特征是一致的,所控制的对象是与汽车行驶直接有关的系统,它们之间存在着较多的信息交流,而且很多都是连续的和高速的。在这里值得一提的是电子组合仪表,虽然它不参与对汽车行驶的控制,但是它是人与车交流的界面。在电子组合仪表上,反映了很多有关汽车行驶方面的信息。例如:车速、发动机转速、冷却液温度、档位、燃油存储量等。此外,在每次汽车点火开关Key—ON时,各个控制单元的自检和初始化结果都将被送到电子组合仪表上。所以,只要将仪表放到驱动系统的数据总线上,就能很方便地获取各个控制单元的有关信息,而且不必再增加额外的连接线。
在大众汽车公司的系统设计概念中,CAN也是一条现成的诊断通路,可以不必依靠ISO9141中定义的K线,而仅依靠系统中的某一个控制器,并以它作为诊断接口或称诊断界面,即可对各个车载控制单元进行自诊断。例如Touran(途安)商务车,利用K线只能对发动机和自动变速器控制单元进行自诊断,而利用自诊断CAN可以对车载的全部34块控制单元进行自诊断。当然,在硬件上省略了诊断接口的同时,在软件上要定义相关的传输协议,使得原来全部的诊断功能,可以在CAN的层面上得以实现,甚至更多。
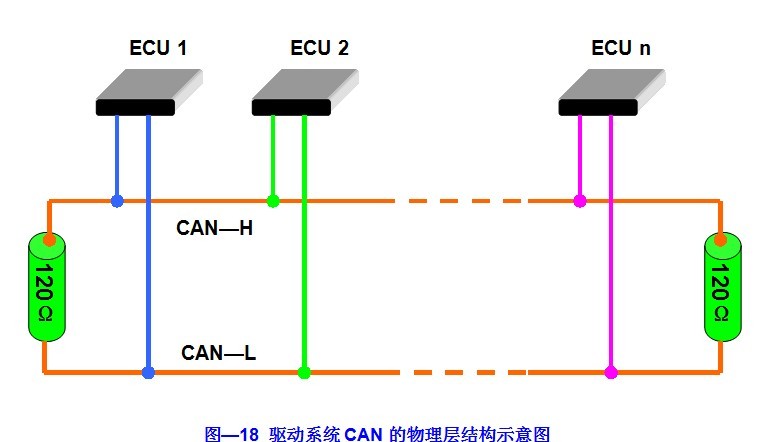
通常驱动系统CAN的物理层界面是按照ISO11895来实现的,如下面的图—18中所示。其中:CAN—H和CAN—L的电平值,如下表—5中所示。

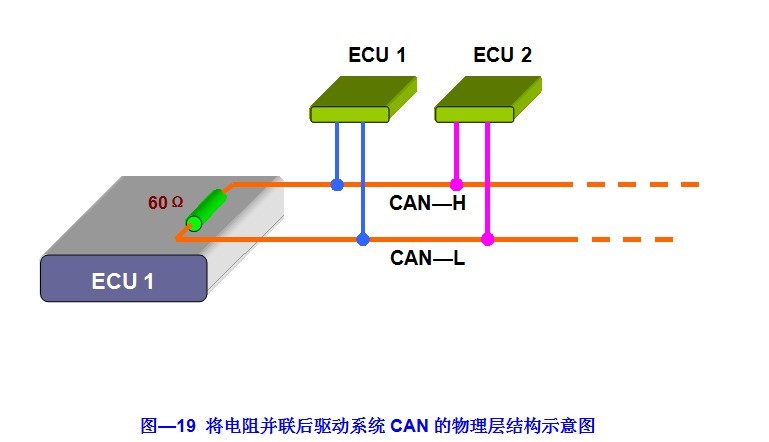
但是大众汽车公司在1999年以后投产的车型上,一改采用了被称为“中心总线连接”的方式,也就是说,将原来分布在两个控制单元中的120Ω的电阻,以并联的形式归并到一个控制单元中,如下面的图—19中所示。
当然这种更改经过了大量的测试和试验,包括电磁兼容测试才最终确定下来。此种改进的优点是:在轿车大批量生产,而客户又有各种不同选择的情况下,它能极大地方便生产和物料管理,并且还能降低管理的成本。
2 车身(舒适)系统CAN
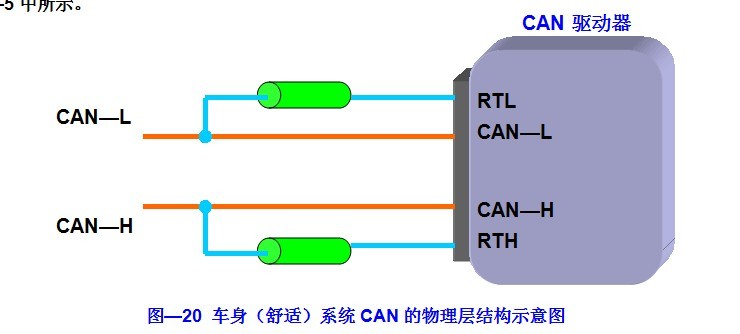
 大众车身(舒适)系统的物理层,是按照ISO标准中的低速CAN定义来实现的。与驱动系统不同,车身(舒适)系统的CAN—H和CAN—L之间不存在连接电阻,而将其连接电阻分别连到CAN驱动器的RTH和RTL上,如下面的图—20中所示。其电平值则如前面的表—5中所示。 大众车身(舒适)系统的物理层,是按照ISO标准中的低速CAN定义来实现的。与驱动系统不同,车身(舒适)系统的CAN—H和CAN—L之间不存在连接电阻,而将其连接电阻分别连到CAN驱动器的RTH和RTL上,如下面的图—20中所示。其电平值则如前面的表—5中所示。
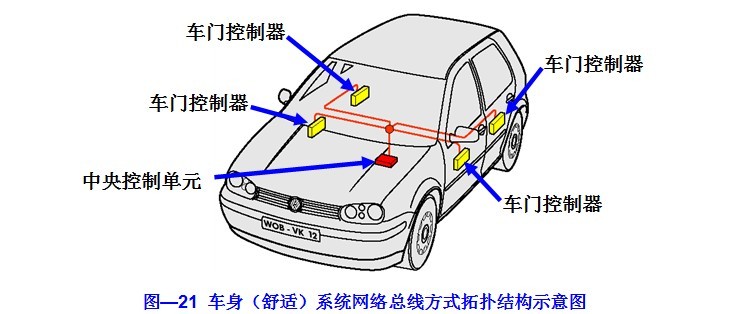
除了驱动系统外,车身(舒适)系统CAN也是一条比较主要的控制器区域网络。它的主要连接对象如下:
1 车身(舒适)系统中央控制单元;
2 4个车门控制器;
3 在某些情况下,还包括记忆模块和其它组件。如图—21中所示。
车身(舒适)系统的控制对象主要有以下元件:
1 4个车门上的集控锁;
2 电动车门摇窗机;
3 行李箱锁;
4 车外后视镜;
5 车内顶灯;
6 驾驶员和前座乘客座椅调整记忆及加热;
7 在具备遥控功能的情况下,还包括对遥控信号的接收处理和其它防盗系统的控制。
从控制功能的角度来看,车身(舒适)系统的很多动作都存在某些相互关联性,只有对所有这些关联性做出非常周密的考虑,才能真正让乘员感到舒适和满意。要让所设计的系统满足这种动作之间的高度相关性,也就是说真正达到舒适性的要求,只能借助于CAN。否则,汽车上的线束将非常庞大和沉重。
在车身(舒适)系统CAN中,各个车门的控制器主要负责各自车门上的功能控制。例如:集控锁的开关、车门窗的升降及车外后视镜的控制。中央控制单元除承担遥控系统的信号接收和处理功能外,更主要的是扮演了系统诊断接口的角色,也就是说,4个车门控制器均不带诊断接口。所有诊断信息均按照这样的路径传输:
  诊断测试仪 中央控制单元 车门控制器。车身(舒适)系统CAN在这层意义上,还必须建立传输通道,以便确保诊断信息的正常流通。 诊断测试仪 中央控制单元 车门控制器。车身(舒适)系统CAN在这层意义上,还必须建立传输通道,以便确保诊断信息的正常流通。
车身(舒适)系统的另两大特色是能单线工作和在系统中实施网络管理。尽管它的通信速率比驱动系统低,但它的技术含量却比驱动系统高。 |

