目前,较流行的现场总线主要有:CAN、Lon Works、PROFIBUS、HARR、FF等。
1 CAN(控制器区域网络)
控制器区域网络CAN(Controller Area Network)是德国Bosch公司为汽车的监测和控制而设计的,逐步发展到用于其它工业部门的控制。CAN已成为国际标准化组织ISO(International Standards Organization)11898标准。
CAN有如下的特性:
1 CAN通信速率在10km范围内为5kbit/s;在40m内为5Mbit/s,节点数110个,传输介质为双绞线(桔黄色为主线色+其它颜色的色条)和光线等。
2 CAN采用点对点、一点对多点及全局广播几种方式发送/接收数据。
3 CAN可实现全分布式、多机系统,且无主、从机之分,每个节点均可主动发送报文。用此特点可方便地构成多机备份系统。
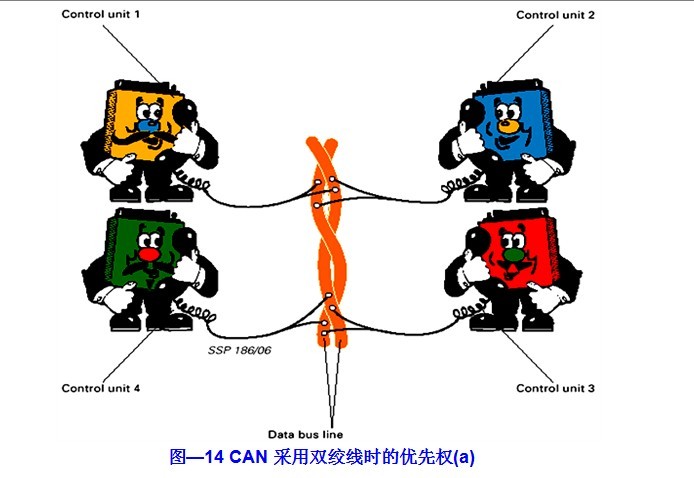
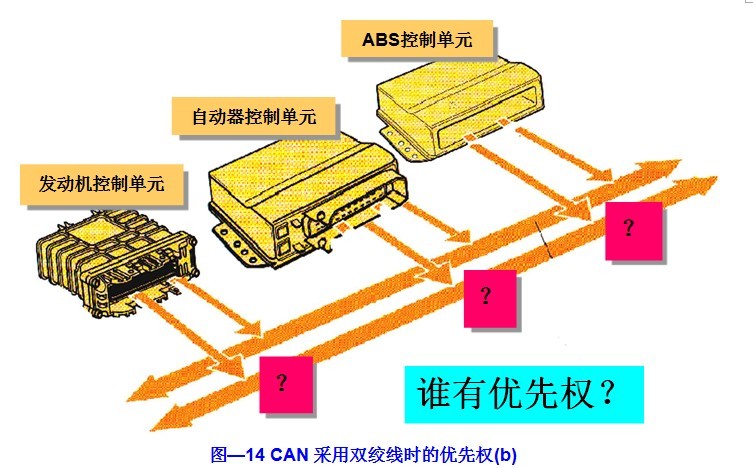
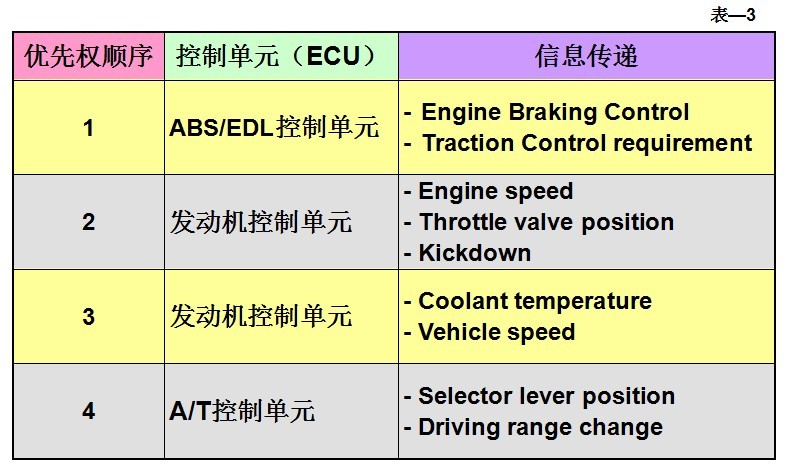
4 CAN采用非破坏性总线优先级仲裁技术,当两个节点同时向网络上发送信息时,优先级低的节点主动停止发送数据,而优先级高的节点可不受影响地继续发送信息。按节点类型分成不同的优先级,可以满足不同的实时要求,如图—14和表—3中所示。
5 CAN支持4类报文帧、远程帧、出错帧、超载帧。采用短帧结构,每帧有效字节数为8个。这样传输时间短,受干扰的概率低,且具有较好的检错效果。
6 CAN采用循环冗余校验CRC及其它检错措施,保证了极低的信息出错率。
7 CAN节点具有自动关闭的功能,当节点错误严重的情况时,则自动切断与总线的联系。这样可以不影响总线的正常工作。
要素组成。
功能块参数分为3个层次:第1层由FF定义,第2层由用户集团定义,第3层由制造厂定义。
为了支持功能块模型的标准化和互操作性,FF定义了两个工具,即设备描述语言DDL和对象字典OD,用来定义和描述AP的“网络可见”的对象,如功能块及其参数。
此外,还有网络管理NM(Network Management)和系统管理SM(System Management)等。
|

