§1。CAN概念
一. 定义
CAN,全称为“Controller Area Network”,即控制器局域网,是国际上应用最广泛的现场总线之一。CAN总线是为解决现代汽车中众多电控模块(ECU)之间的数据交换而开发的一种串行数据总线
二. CAN网络组成
CAN是由传输媒体与一系列电控模块(ECU)组成。
传输媒体--双绞线, 这两条信号线被称为CAN_H 和CAN_L
信号电平和位表示--静态时是2.5V 用CAN_H(3.5V) 比CAN_L(1.5V) 高表示的逻辑0 被称为显形位,而用CAN_L(3.5V) 比CAN_H(1.5V) 高表示的逻辑1 叫做隐性位
电控模块(ECU)就是特定的数据采集、显示、控制单元,如发动机电控模块(ECM),自动变速箱电控模块(TCM),灯控模块。
§2. CAN信号分类
一. 输入信号
① 开关量:只有通/断两种状态,如小灯开关、油压报警、ABS故障等
② 模拟量:用数值表示的量,如水温、油量、车速等
二. 输出信号
执行特定功能的信号,如点火、側位灯、车身提升等
§3. CAN数据的产生\传输\指示
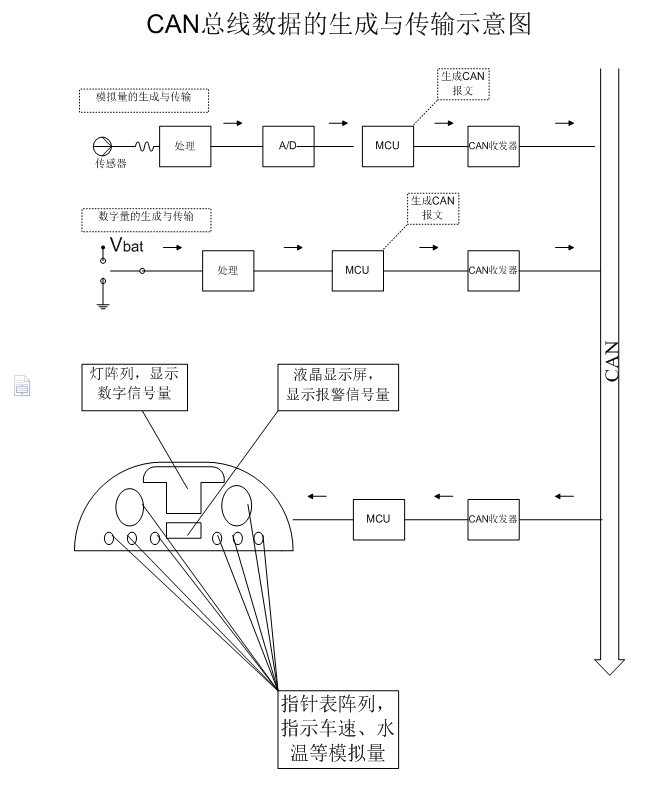
§4. CAN系统中的控制过程(见下图)

|

